
M3 | Descending control – Medial system
Locomotion
Central pattern generators (CPGs)
Media: Kaltura Mediaspace
Transcript
[Scientific American Frontiers, Season 11 – Episode 7 – The Bionic Body: Moving memories, 3/27/2001, 4:24 min]
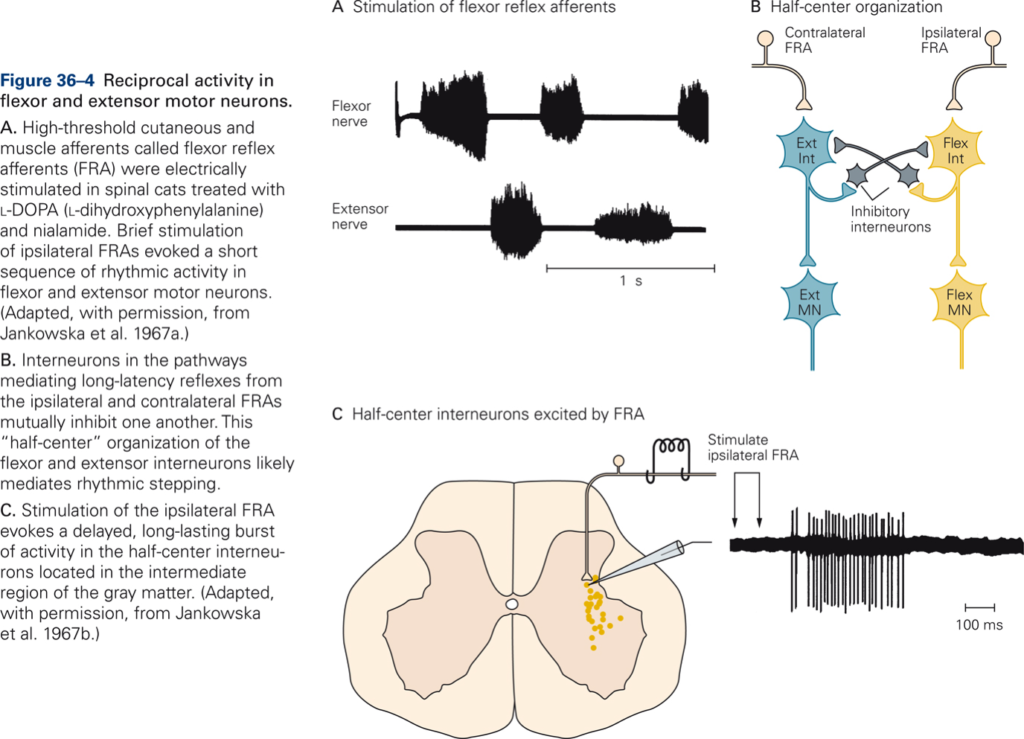
Half-center hypothesis
A simple neural circuit that produces alternating activity in flexor and extensor muscles in a single limb.
- To induce alternating leg movements each leg needs a half-center circuit and these half center circuits need to be coordinated to produce locomotion.
- The flexion movements roughly correspond to the swing phase of locomotion whereby the lower leg is lifted while the hip moves from an extended to a flexed position as the heel is brought forward. Stance corresponds roughly to the period that the foot is on the ground and the leg is extended to support the weight of the body.
Watch: Neural Control of Walking and Running | HHMI’s Biointeractive 2008
Watch: Kinematic analysis of walking (56 sec) | HHMI’s BioInteractive 2008
Media: Kaltura Mediaspace
Isolated spinal cord preparation
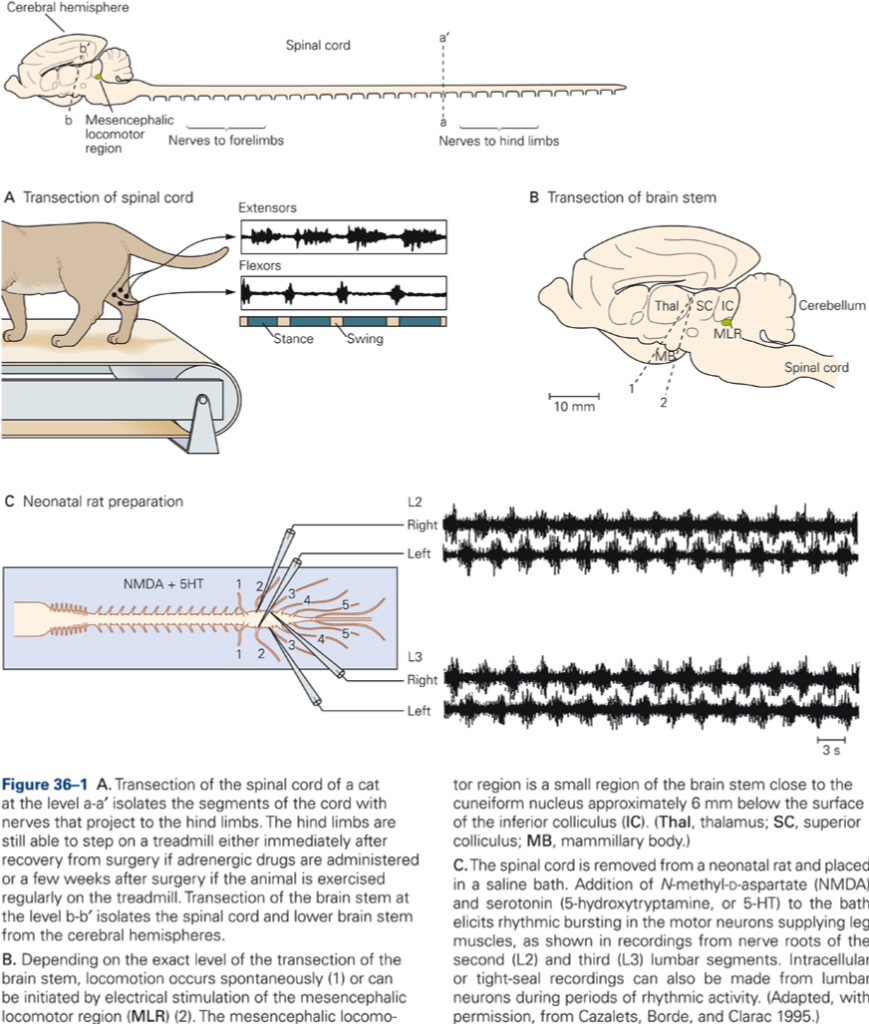
Following separation of the spinal cord from the brainstem and cerebral cortex, cats can still walk on a treadmill (when properly supported). In this preparation, we can study CPGs in isolation, and we can record EMG activity in flexor and extensor muscles.
Watch: Walking versus hopping (1:12 min) | HHMI’s BioInteractive 2008
Media: Kaltura Mediaspace
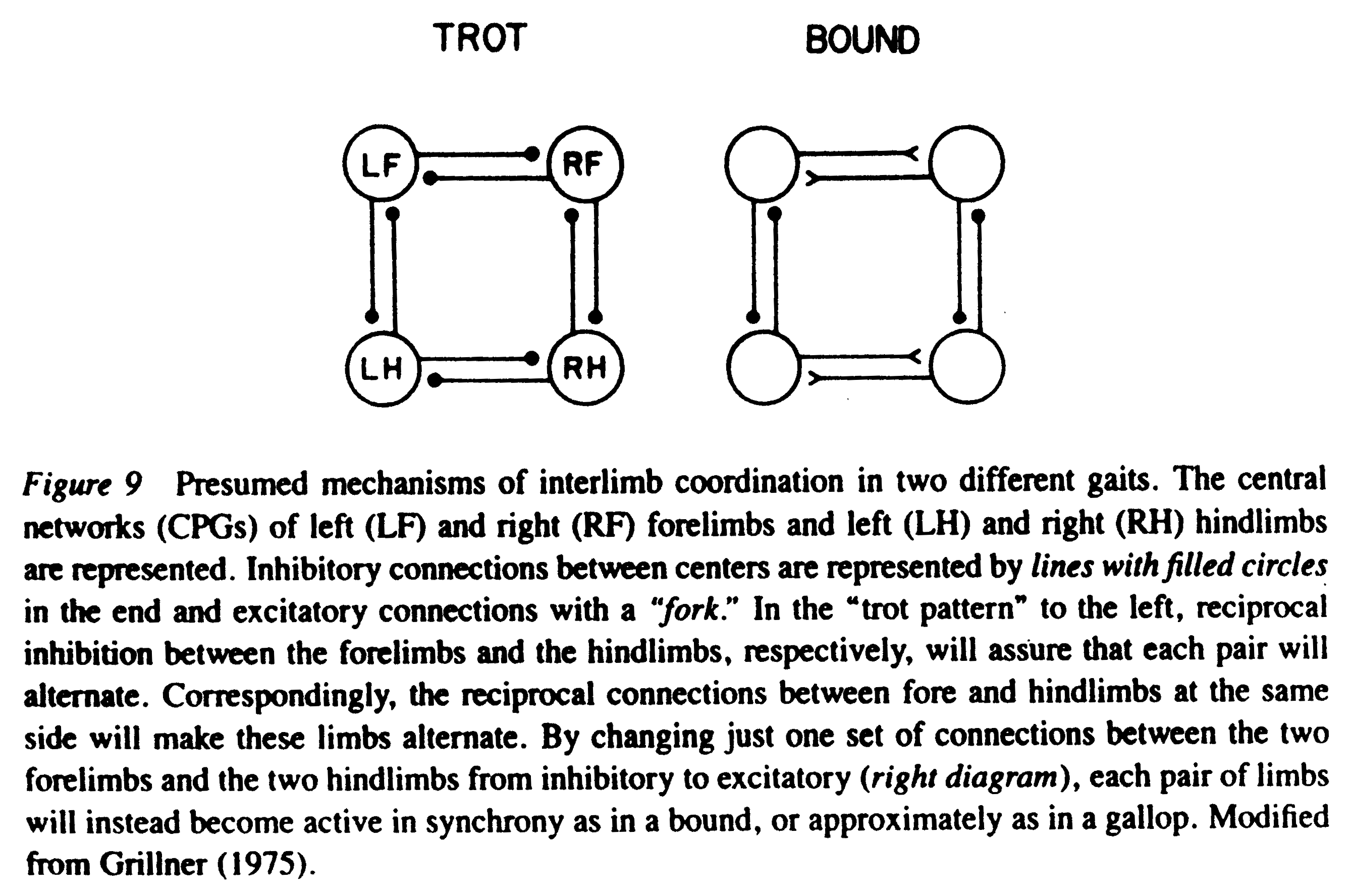
Spinal CPGs are also sophisticated enough to switch gait, i.e. in a quadruped, increased activity in the CPGs switches the pattern of locomotion from walk to gallop. Thus CPGs provide coordination between the limbs.
CPGs receive descending control from brainstem and motor cortex
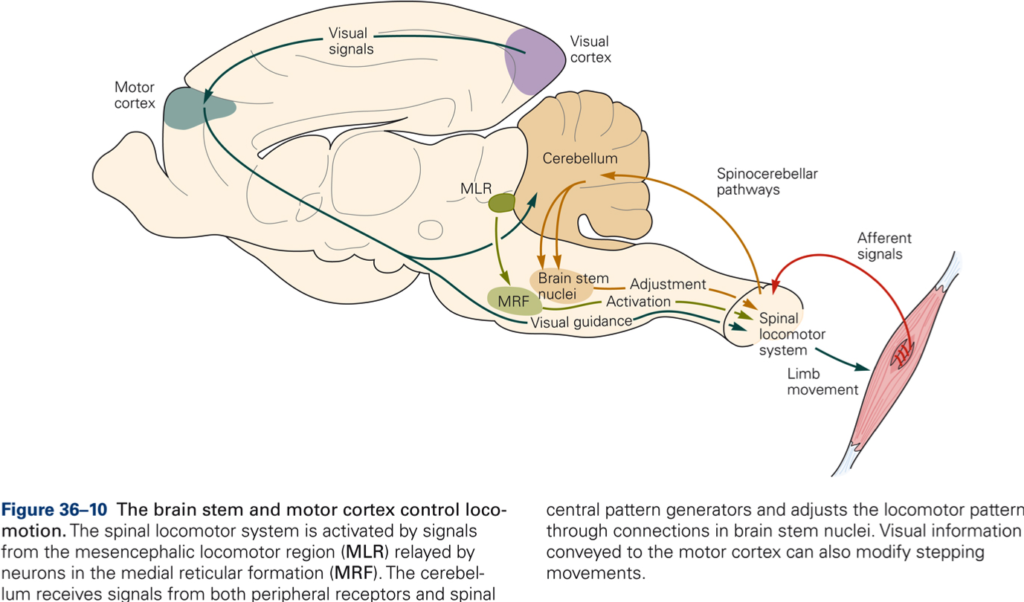
Midbrain locomotor region (MLR)
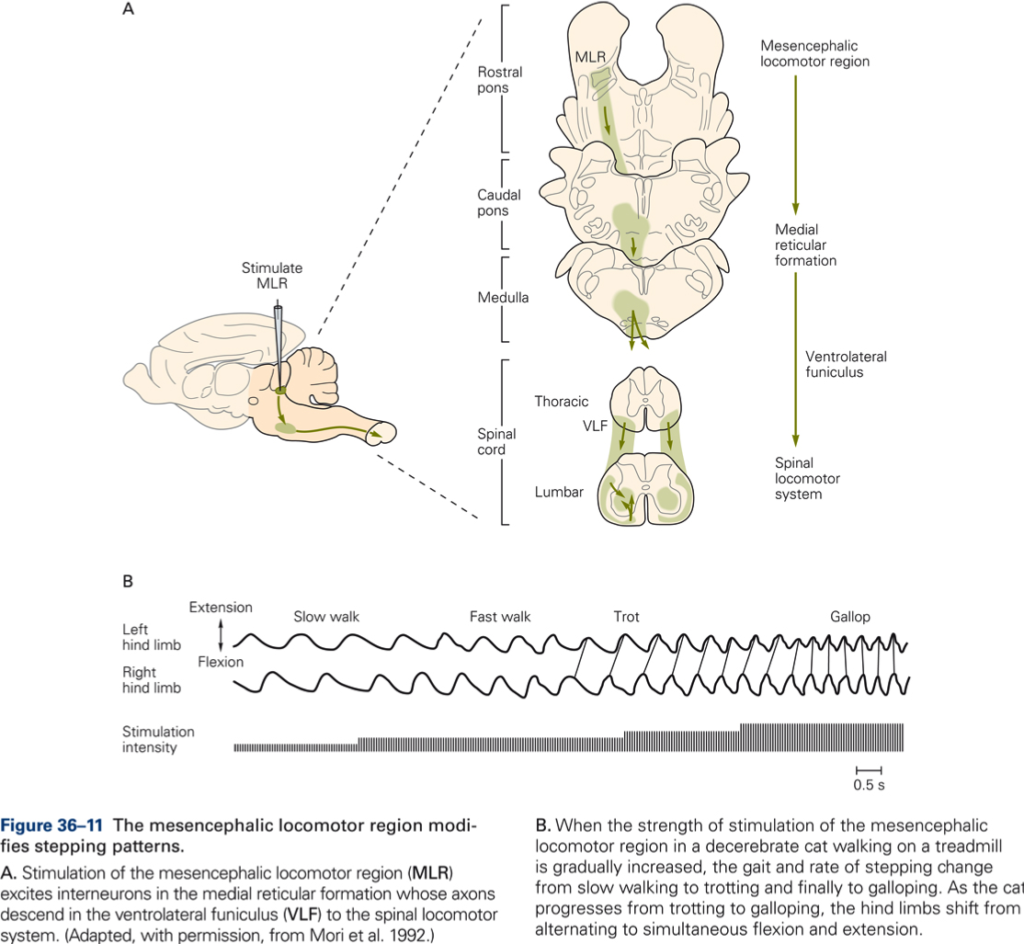
Evidence for the importance of the MLR comes from the decerebrate cat preparation in which the cut that separates the brainstem and spinal cord from the cerebral cortex is made just rostral to the MLR. Electrical stimuli applied to the MLR then activate spinal CPGs and initiate locomotion.
- Electrical stimulation of the MLR produces the basic locomotor pattern.
- Stimulus intensity sets the speed of locomotion (cadence, or rate at which swing and stance phases alternate one another). MLR activity controls the timing and strength of muscle contractions.
- The descending motor pathway involved is the reticulospinal tract. This pathway uses monaminergic transmitters (DA) to activate spinal CPGs.
Key Takeaways
The midbrain locomotor region (MLR) and the reticulospinal tract are particularly important for producing locomotion patterns; they control the frequency and the type of gait expressed by the CPGs.
Role of sensory inputs
Spinal CPGs and the MLR can produce locomotion independent of sensory input. Thus, although sensory input is not necessary for generating locomotion it serves several functions:
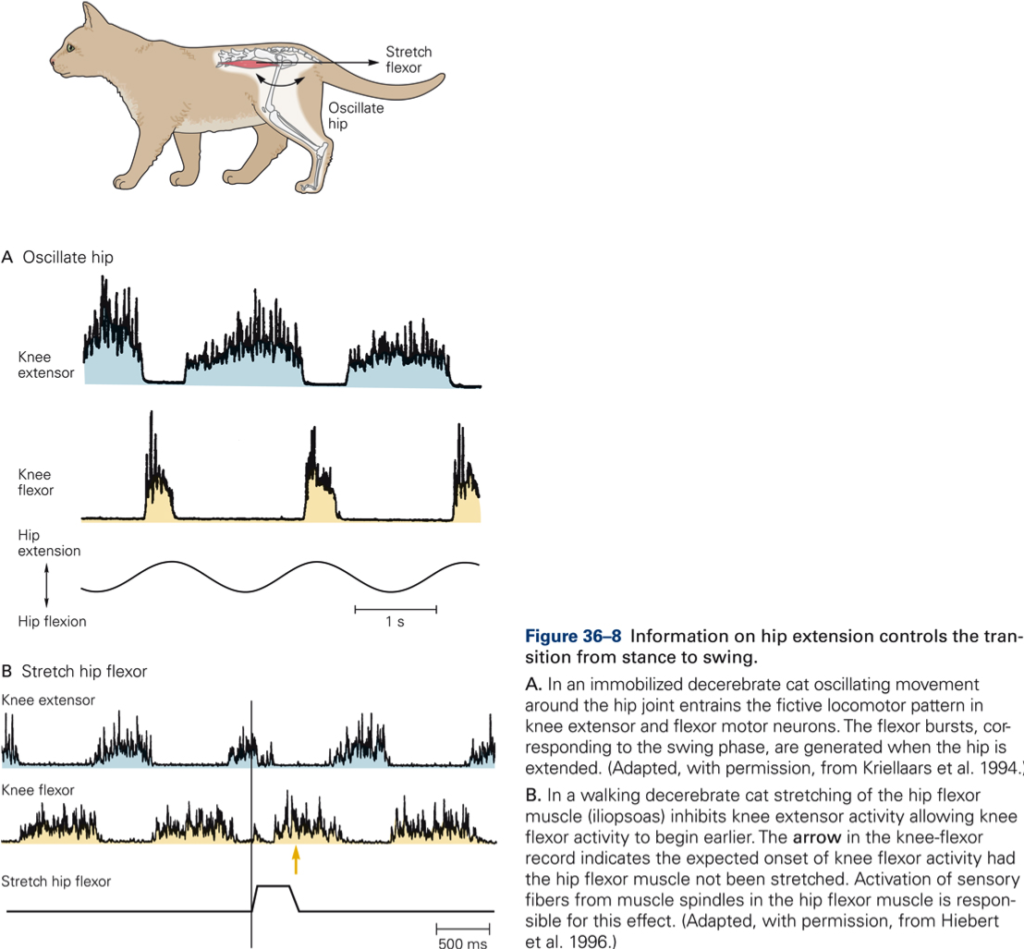
1. Switch locomotion pattern from stance to swing phase and vice versa
During peak extension of the limb during the stance phase, there is a critical period in which receptors of in particular the hip joint trigger a sudden cessation of extensor activity, thereby allowing the onset of flexor activity at the start of the swing phase. This is important since the limb during the stance phase supports the body; a premature onset of the swing phase in the supporting limb would destabilize the body.
2. Adapt locomotor activity to compensate for changes in the external environment
Activation of cutaneous afferents when a cat’s limb encounters an obstacle during the swing phase triggers flexion of the limb in order to clear the obstacle.
Stumbling corrective response
Stimulation of paw dorsum during swing phase triggers enhanced flexion. Simulation of this compensatory role of sensory afferents has been achieved with weak electrical stimulation to the foot dorsum during the swing phase. The same flexion response occurs (stumbling corrective response).
Reflex reversal
The same stimulus applied to the foot dorsum during the stance phase leads to enhanced extension of the limb. The response is referred to as reflex reversal. It is appropriate or adaptive since this limb supports the cat’s weight.
Role of higher brain centers
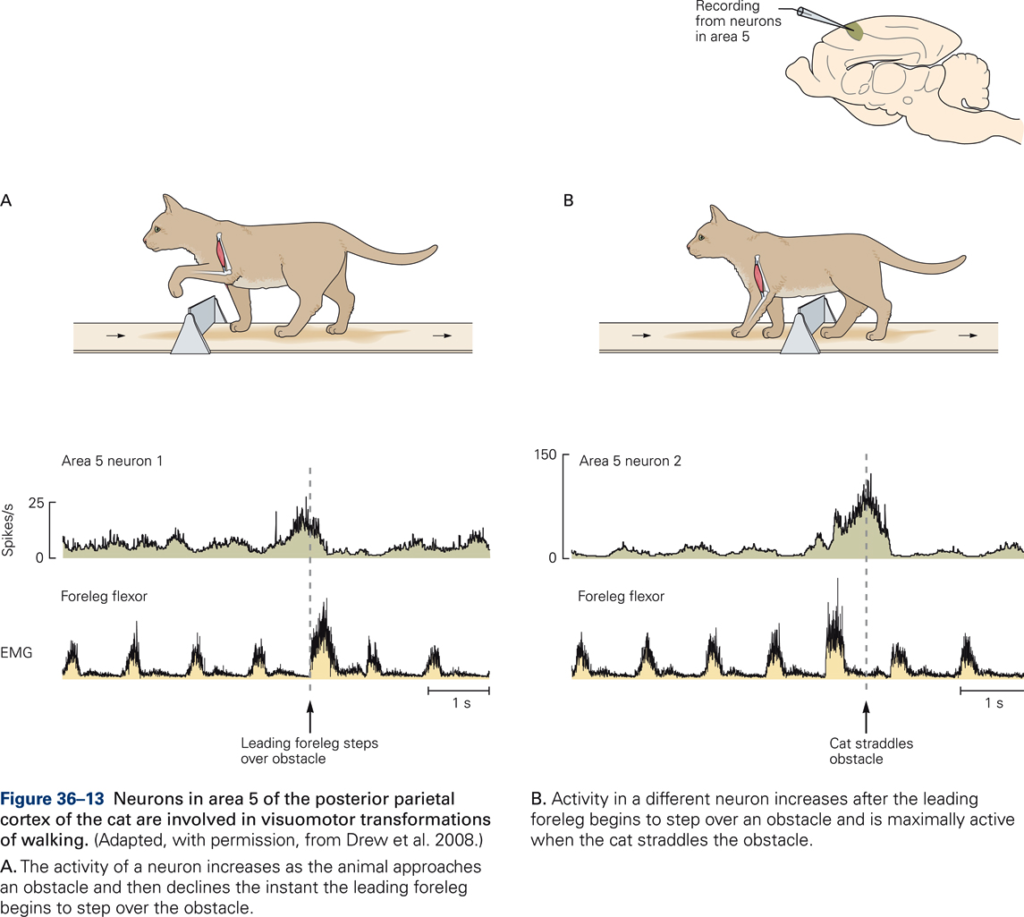
Activity of neurons in motor cortex is modulated by visual inputs to adapt stepping.
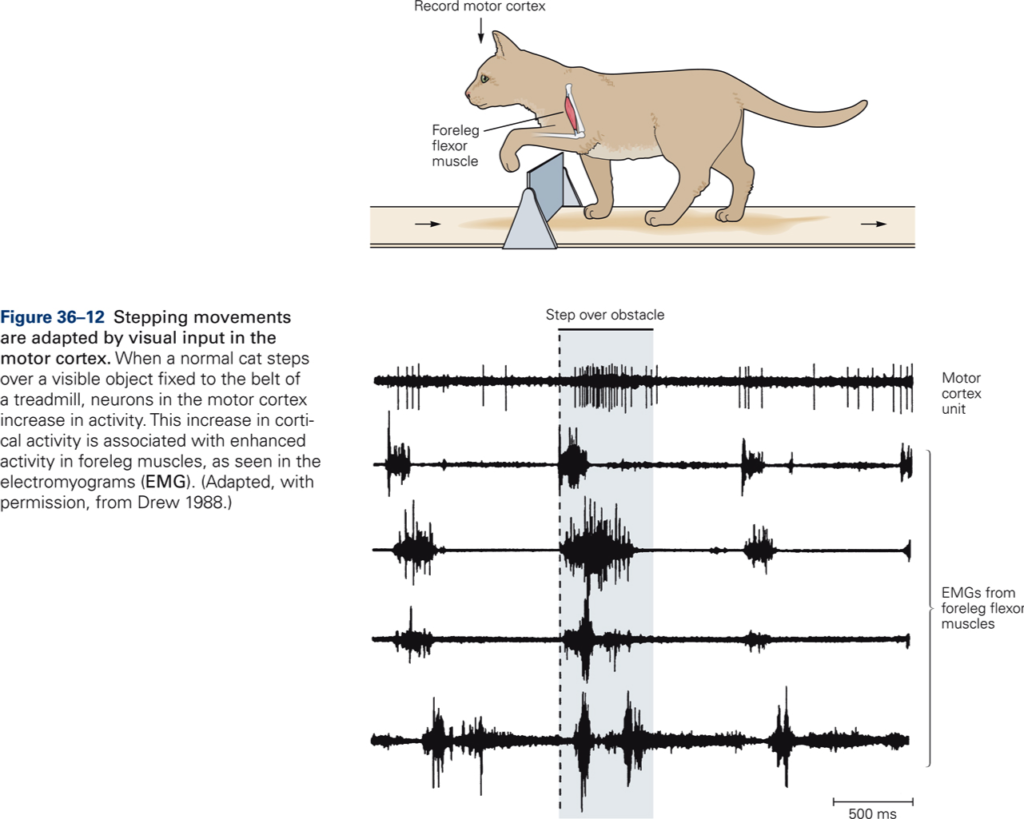
Cerebral cortical motor areas provide further refinement and provide adaptations to the locomotor patterns that require visual input. This can be demonstrated by observing the differences between normal and decorticate cats when they walk on a flat surface as opposed to when they walk on a narrow bar. Decorticate cats make many more mistakes in placing their feet when walking along the bar, causing them to fall off.
Although locomotion is a voluntary act, it is one of the most automatic ones. When we walk on the sidewalk, we do not need to monitor every step, or where we place or feet, however, when we hike along a rocky trail, we pay close attention to placement of our feet.
Watch: Neurons in parietal cortex are active during straddling (1:04 min) | HHMI BioInteractive 2008
Media: Kaltura Mediaspace
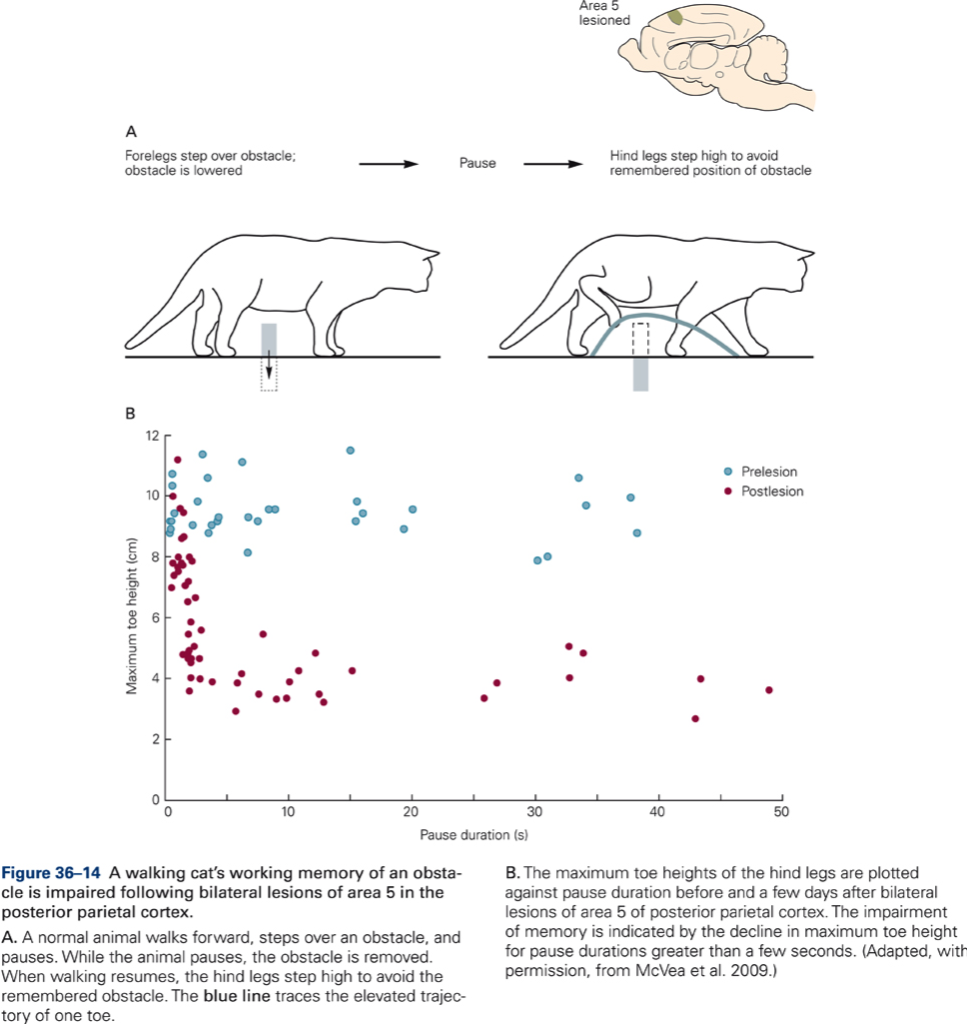
Watch: Using spatial memory to clear an obstacle | Jessell | HHMI BioInteractive 2008
Media: Kaltura Mediaspace
Watch: Cat remembers obstacle location for many minutes | Jessell | HHMI BioInteractive 2008
Media: Kaltura Mediaspace
Key Takeaways
- Studies of locomotion provide a particularly good example of how spinal circuits responsible for relatively simple reflexes simplify the control of voluntary movement.
- Central pattern generators, the spinal circuits that generate the basic locomotor pattern, enable higher centers to control a complex movement pattern with relatively simple descending signals.
