
Part V. Agent-based models vs ODE models
V-1. Introduction
Many models in Evolutionary Game Theory are described as systems of Ordinary Differential Equations (ODEs). The most famous example is the Replicator Dynamics (Taylor and Jonker, 1978), which reads:

where:
 is the fraction of
is the fraction of  -strategists in the population.
-strategists in the population. describes how the fraction of -strategists changes in time.
describes how the fraction of -strategists changes in time. is the expected payoff of strategy . That is, if
is the expected payoff of strategy . That is, if  is the payoff that an -strategist obtains against a
is the payoff that an -strategist obtains against a  -strategist, then
-strategist, then  . This is also the average payoff that an -strategist would obtain if he played with the whole population.
. This is also the average payoff that an -strategist would obtain if he played with the whole population. is the average payoff in the population.
is the average payoff in the population.
ODE models are very different from the agent-based models we have considered in this book. Our goal in this Part V is to clarify the relationship between these two kinds of models. We will see that most ODE models in Evolutionary Game Theory can be seen as the mean dynamic of an agent-based model where agents follow a certain decision rule in a well-mixed population.[1] This implies that those ODE models provide a good deterministic approximation to the dynamics of the corresponding agent-based model over finite time spans when the number of agents is sufficiently large (Benaïm & Weibull, 2003; Sandholm, 2010a, chapter 10; Roth & Sandholm, 2013). For this reason, ODE models in Evolutionary Game Theory are often called infinite-population models (because they describe dynamics of populations whose size tends to infinity), while agent-based models are sometimes called finite-population models.[2]
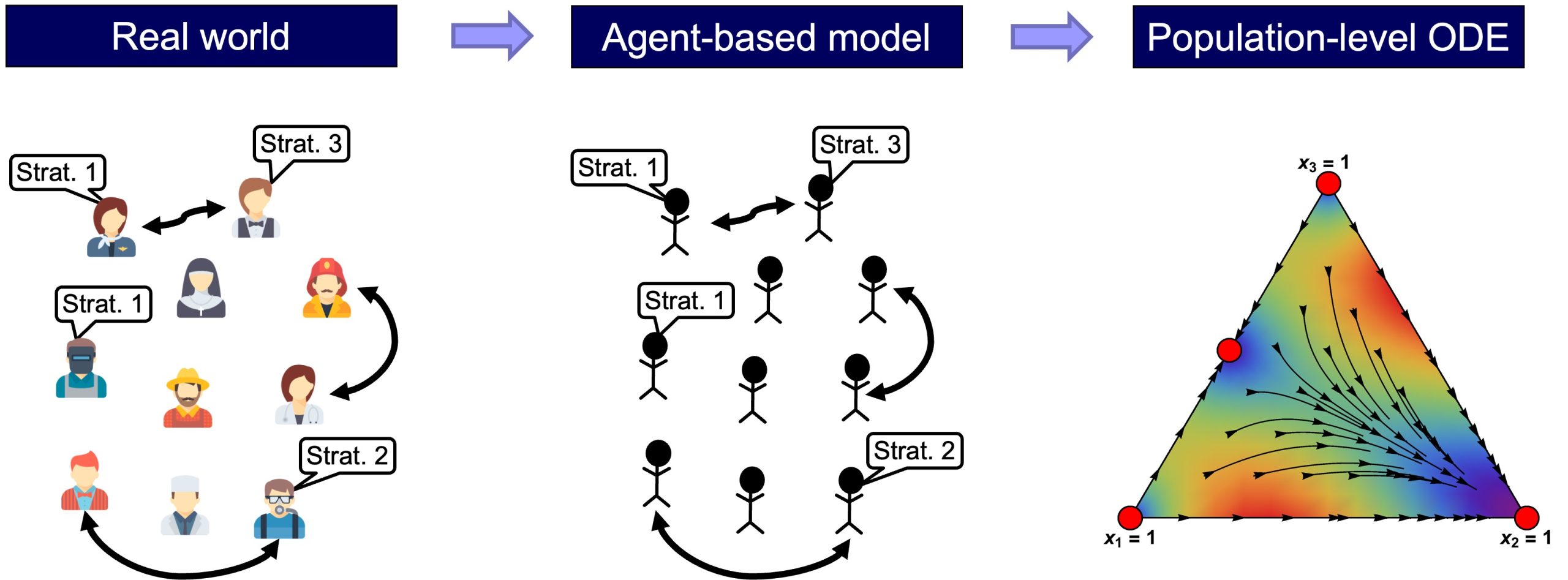
It is also clear that the ODE models represent a higher level of abstraction than the agent-based models, in the sense that the variables in the ODE models are population-level aggregates, while the agent-based models are defined at the individual level (fig. 1).
In fact, in many cases, there is a wide range of different agent-based models which share the same mean dynamic. For instance, consider the replicator dynamics, which is often derived as the infinite-population limit of a certain model of biological evolution (see derivations in e.g. Weibull (1995, section 3.1.1), Vega-Redondo (2003, section 10.3.1) or Alexander (2023, section 3.2.1)). In the following chapters we will see that the replicator dynamics is also the mean dynamic of the following disparate agent-based models:[3]
- A model where agents in a well-mixed population follow the imitative pairwise-difference rule using expected payoffs (Helbing,1992; Schlag, 1998; Sandholm, 2010a, example 5.4.2; Sandholm, 2010b, example 1).
- A model where agents in a well-mixed population play the game just once with a random agent and follow the imitative pairwise-difference rule (Izquierdo et al., 2019, example A.2).
- A model where agents in a well-mixed population follow the so-called imitative linear-attraction rule using expected payoffs (Hofbauer, 1995a; Sandholm, 2010a, example 5.4.4; Sandholm, 2010b, example 1).
- A model where agents in a well-mixed population play the game just once with a random agent and follow the so-called imitative linear-attraction rule (Izquierdo et al., 2019, remark A.3).
- A model where agents in a well-mixed population follow the so-called imitative linear-dissatisfaction rule using expected payoffs (Weibull, 1995, section 4.4.1; Björnerstedt and Weibull, 1996; Sandholm, 2010a, example 5.4.3; Sandholm, 2010b, example 1).
- A model where agents in a well-mixed population play the game just once with a random agent and follow the so-called imitative linear-dissatisfaction rule (Izquierdo et al., 2019, remark A.3).
In the next chapter, we extend the (well-mixed population) model we developed in Part II by including different decision rules that have been studied in the literature and different ways of computing payoffs. Then, in chapter V-3, we derive the mean dynamic of each of the possible parameterizations of this extended agent-based model. We will see that some parameterizations that generate different stochastic dynamics share the same mean dynamic. In this way, we hope that the (many-to-one) relationship between agent-based models and ODEs will be perfectly clear.
- The term well-mixed population refers to a population where all individuals are equally likely to interact with each other. ↵
- Another reason is that the fraction of -strategists in ODE models changes continuously in the interval [0,1], while in a finite population of
 individuals, this fraction would have to be a multiple of
individuals, this fraction would have to be a multiple of  . See footnote 31 in Alexander (2023). ↵
. See footnote 31 in Alexander (2023). ↵ - Some of these models lead to the replicator dynamics up to a speed factor, i.e., a constant may appear multiplying the whole right-hand side of the equation of the replicator dynamics. This constant can be interpreted as a change of time scale. ↵
